Reversible deformation of a machine holds enormous promise across many scientific areas ranging from mechanical engineering to applied physics. So far, such capabilities are still hard to achieve through conventional rigid materials or depending mainly on elastomeric materials, which however own rather limited performances and require complicated manipulations. Here, we show a basic strategy which is fundamentally different from the existing ones to realize large scale reversible deformation through controlling the working materials via the synthetically chemical-electrical mechanism (SCHEME). Such activity incorporates an object of liquid metal gallium whose surface area could spread up to five times of its original size and vice versa under low energy consumption. Particularly, the alterable surface tension based on combination of chemical dissolution and electrochemical oxidation is ascribed to the reversible shape transformation, which works much more flexible than many former deformation principles through converting electrical energy into mechanical movement. A series of very unusual phenomena regarding the reversible configurational shifts are disclosed with dominant factors clarified. This study opens a generalized way to combine the liquid metal serving as shape-variable element with the SCHEME to compose functional soft machines, which implies huge potential for developing future smart robots to fulfill various complicated tasks.
Scientific Reports, 2014
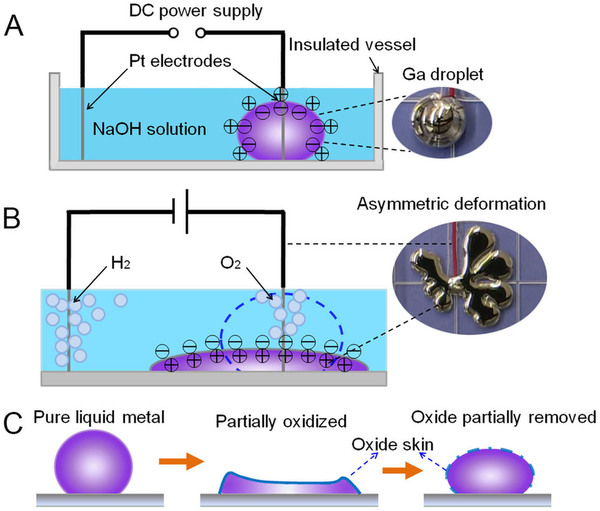
Working mechanism of the reversible liquid metal deformation.
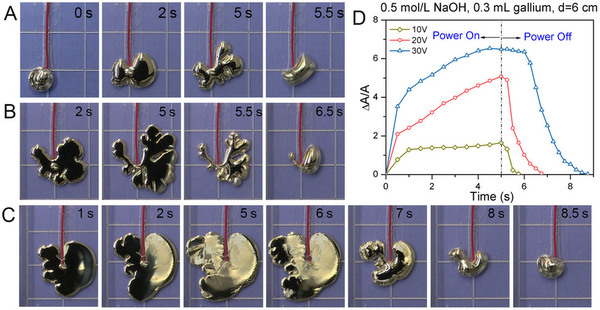
The reversible deformation with 6 cm electrode spacing and 5 s power-on time under the condition of 0.3 mL liquid gallium and 0.5 mol/L NaOH solution at 32°C.